Emotional Sensitivity in Human-Robot Interaction (HRI) for Explainability upon Decision-Making Reasoning
In social robotics, it is vital for agents to be responsive to both the surrounding physical environment and the people they interact with.
Failure to adapt to continuously changing environments can negatively impact user trust and acceptance.
Furthermore, increasing emphasis is placed on human alignment, where human competence is prioritized over AI intelligence.
This includes explaining decision-making processes, anticipating others' needs, and understanding implicit emotional cues.
Widespread adoption requires AI systems to communicate, collaborate, learn, and adapt to the people they interact with while aligning with human values.
Date: 2024 - 2026
Persons participating in the project:
PIs: Dr. Francisco Cruz, Prof. Flora Salim, Dr. Benjamin Tag
Description:
As Social Robotics and Human–Robot Interaction (HRI) become increasingly integrated into everyday life, systems must operate reliably in complex, dynamic, and context-rich environments.
With embodied Artificial Intelligence (AI) controlling behavior, ensuring safe, transparent, and trustworthy decision-making is essential for widespread adoption.
However, current systems face challenges in adaptability, generalization, transparency, and safe deployment in collaborative settings,
often failing to adapt to both physical environments and the people they interact with.
Emotional Intelligence (EI) is an ambitious research domain and perhaps can be understood by linking semantic-based brain activation
(e.g., motor and cognitive processes) with emotion-based activation patterns, in order to be implemented in HRI.
By analyzing the relationships, it could better inform how task performance is influenced by emotion and therefore Emotion Regulation (ER) from social robots can be utilized to enhance human-robot collaboration.
These findings can be used to develop new bioinspired cognitive architectures and serve
as a foundation for embodied and affective hybrid intelligence systems that can utilize the relationships alongside the deep contextual understanding of emotions, for safer and more trustworthy HRI.
Embodied AI systems must also respond continuously to dynamic physical environments, such as non-verbal gestures which enhance communication and collaboration.
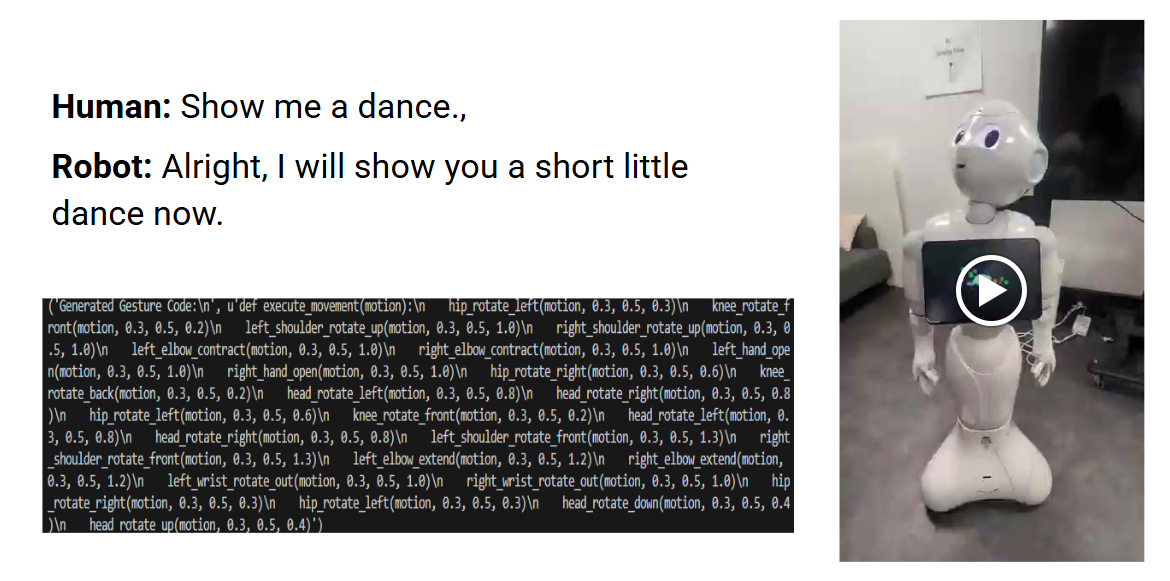
Large Language Models (LLMs) are now popularly being used as generative AI in order to dynamically program robot code in real-time, such as expressive gestures.
However social behaviours from base models are not particularly human-aligned and therefore,
requiring learning methods that can take intuitive human feedback for AI systems to continuously learn from, such as Reinforcement Learning with Human Feedback (RLHF).
Ultimately, enabling social robots to operate in the dynamic and unpredictable real-world.
Media:
Additional images/video
Selected Publications
Web
Lee, C., Sandoval, E. B., & Cruz, F. (2024, November). Human Decision-Making Concepts with Goal-Oriented Reasoning for Explainable Deep Reinforcement Learning. In Australasian Joint Conference on Artificial Intelligence, (pp. 228-240). Singapore: Springer Nature Singapore.