
ARI Robot ARI is a social humanoid robot developed by PAL Robotics for research and human–robot interaction applications. It combines autonomous navigation, speech and vision capabilities, and expressive gestures to interact naturally with people in environments such as laboratories, healthcare facilities, and educational settings. Built on the ROS framework, ARI provides a flexible platform for research in robotics, artificial intelligence, and autonomous learning.

Pepper Robot Pepper is a social humanoid robot developed by SoftBank Robotics and designed to interact naturally with people through speech, gestures, and facial expressions. Equipped with cameras, microphones, a touchscreen, and autonomous navigation capabilities, Pepper is widely used in research, education, healthcare, and customer service applications. It provides a versatile platform for studying human–robot interaction, social robotics, and artificial intelligence in real-world environments.

Baxter Robot Baxter is a collaborative dual-arm robot developed by Rethink Robotics for research and industrial applications. Designed to safely operate alongside humans, Baxter features two 7-degree-of-freedom arms, integrated cameras, and an expressive display that communicates its intentions and status. Its versatility and ease of programming have made it a popular platform for research in robot learning, manipulation, human–robot collaboration, and reinforcement learning.

Kinova Gen3 Lite Kinova Gen3 Lite is a compact and lightweight collaborative robotic arm developed by Kinova Robotics for research, education, and light manipulation tasks. With 6 degrees of freedom, integrated sensing capabilities, and an easy-to-use control interface, it provides a cost-effective platform for studying robot manipulation, human–robot interaction, and autonomous learning. Its portability and ROS compatibility make it well suited for laboratory and educational environments.

Kinova Gen3 Kinova Gen3 is a lightweight, collaborative robotic arm developed by Kinova Robotics for research, education, and industrial applications. Featuring 7 degrees of freedom, integrated torque sensing, and advanced control capabilities, the Gen3 enables safe and precise manipulation in dynamic environments. Its flexibility, ROS compatibility, and ease of integration make it a popular platform for research in robot learning, manipulation, human–robot collaboration, and autonomous robotics.

NAO Robot NAO is a small humanoid robot developed by SoftBank Robotics (formerly Aldebaran Robotics) for research, education, and human–robot interaction studies. Equipped with cameras, microphones, speakers, touch sensors, and 25 degrees of freedom, NAO can walk, gesture, speak, and interact naturally with people. Its versatility and programmable architecture have made it a widely used platform for research in robotics, artificial intelligence, social interaction, and robot learning.

TurtleBot3 Waffle TurtleBot3 Waffle is an open-source mobile robot developed by ROBOTIS for research and education in robotics and artificial intelligence. Equipped with a LiDAR sensor, onboard computer, camera support, and ROS compatibility, it provides a versatile platform for autonomous navigation, mapping, localization, and robot learning. Its modular design and affordability have made it a popular platform for research in mobile robotics and Reinforcement Learning.
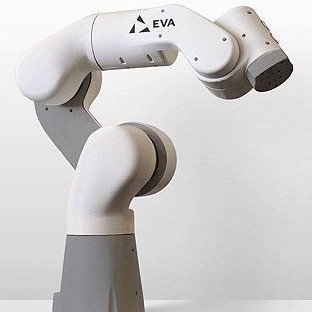
Automata Eva EVA is a compact desktop robotic arm developed by Automata Technologies for education, research, and light industrial automation. Featuring 6 degrees of freedom, a lightweight design, and an intuitive programming interface, EVA provides an accessible platform for studying robot manipulation, automation, and human–robot interaction. Its affordability and ease of deployment make it particularly suitable for teaching and prototyping robotic applications.

Unitree Go1 Unitree Go1 is a quadruped mobile robot developed by Unitree Robotics for research, inspection, and autonomous mobility applications. Equipped with advanced locomotion capabilities, onboard sensors, and AI-enabled perception, it can navigate complex and uneven terrains with agility and stability. Its ROS compatibility and versatile hardware make it a popular platform for research in legged locomotion, autonomous navigation, reinforcement learning, and embodied AI.

Unitree Go2 Unitree Go2 is the latest generation quadruped robot from Unitree Robotics, offering significant improvements over its predecessor in perception, computing power, and autonomous capabilities. Equipped with enhanced onboard AI processing, a richer sensor suite, and more robust locomotion control, the Go2 is designed for advanced navigation and interaction in dynamic environments. These upgrades make it an excellent platform for research in autonomous systems, legged locomotion, reinforcement learning, and embodied AI, particularly in scenarios requiring greater autonomy and real-world adaptability.

Kinova Jaco JACO is a lightweight collaborative robotic arm developed by Kinova Robotics for assistive, research, and service robotics applications. Featuring 6 degrees of freedom, a multi-finger gripper, and intuitive control interfaces, JACO is designed to perform dexterous manipulation tasks in human-centered environments. Its flexibility and ease of integration have made it a widely used platform for research in robot manipulation, assistive robotics, human–robot interaction, and autonomous learning.
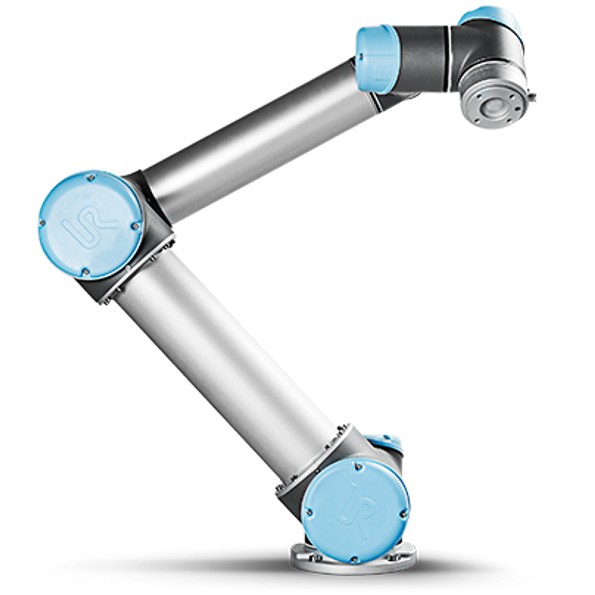
UR5e/UR10e UR5/10 is a collaborative robotic arm developed by Universal Robots for industrial, educational, and research applications. Featuring 6 degrees of freedom, high precision, and a 5/10 kg payload capacity, it is well suited for manipulation tasks such as pick-and-place, assembly, and object handling. Its ease of programming, flexibility, and compatibility with ROS have made it a widely used platform for research in robot manipulation, learning, and human–robot collaboration.

Crazyflie drone Crazyflie is a small, lightweight nano-quadcopter developed by Bitcraze for research and education in robotics and autonomous systems. Despite its compact size, it supports onboard sensing, wireless communication, and programmable control, making it a versatile platform for studies in swarm robotics, autonomous flight, reinforcement learning, and multi-agent systems. Its open-source hardware and software ecosystem have made it particularly popular in academic research.

Toyota HSR Toyota HSR (Human Support Robot) is a mobile manipulator developed by the Toyota Research Institute for assistive robotics and human-centered environments. It combines autonomous navigation with a lightweight robotic arm, enabling it to perform tasks such as object retrieval, pick-and-place operations, and household assistance. Its integrated perception, manipulation, and mobility capabilities make it a widely used platform for research in service robotics, human–robot interaction, autonomous assistance, and robot learning.

Booster Booster T1 is a humanoid robot developed by Booster Robotics for research, education, and embodied AI applications. Standing approximately 1.2 m tall, it features force-controlled joints, onboard AI computing, and ROS 2 compatibility, providing a flexible platform for research in humanoid locomotion, manipulation, reinforcement learning, and human–robot interaction. Its open-source development framework and robust hardware design make it particularly suitable for robotics research and rapid algorithm prototyping.