Robust Skill Chaining for Hierarchical Reinforcement Learning

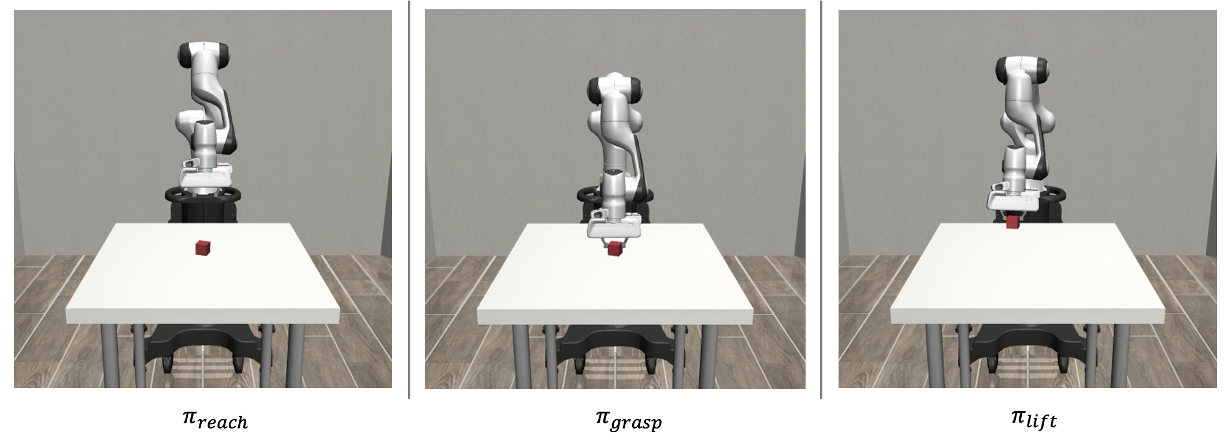
Robotic manipulation has advanced rapidly in recent years, yet moving from short, isolated behaviours to complex, long-horizon tasks that involve multiple contact-rich primitives remains a significant challenge. Hierarchical Reinforcement Learning (HRL) offers a promising approach by breaking down such tasks into reusable skills, each operating over a shorter time scale. A high-level controller learns to sequence these skills during execution, enabling more sophisticated behaviour. This project investigates how primitive skills can be acquired, adapted and reused to facilitate the execution of long-horizon manipulation tasks, potentially improving efficiency and robustness in robotic systems. Date: 2025 - 2028 Persons participating in the project:
- PIs: Dr. Francisco Cruz, A/Prof. Gelareh Mohammadi
- Associates: Madeleine Nouri
- Corresponding contact: m.nouri@unsw.edu.au
- Hierarchical Reinforcement Learning
- Robotic Manipulation
- Skill Chaining
- Sample Efficiency