Human activity Monitoring and Pose Estimation under partial Occlusion
Understanding human body motion is a fundamental capability in computer vision, with broad applications in robotics, healthcare, and activity monitoring.
However, correctly detecting poses remains challenging due to unavoidable factors such as occlusion, depth ambiguity, and motion uncertainty.
Date: 2024 - 2027
Persons participating in the project:
PIs: Dr. Francisco Cruz, Dr. Eduardo Benitez Sandoval, Prof. Erik Meijering
Description:
Human pose estimation aims to detect and localise the joints of the human body from images and videos.
It has applications across a wide range of domains, including action recognition, healthcare monitoring, sports analysis, and human-robot interaction.
The remarkable progress in deep learning has led to increasingly accurate pose estimation systems.
However, in practice, people move in complex, cluttered scenes where body parts are frequently hidden behind objects, other individuals, or their own body parts.
This creates occlusion conditions that cause estimators to produce unreliable predictions.
Similarly, it can be affected by depth ambiguities where a single 2D observation can correspond to multiple valid 3D configurations,
making it difficult to recover a unique and accurate 3D pose.
Existing approaches also face important practical limitations.
Many pose estimation models are computationally expensive, restricting their use in resource-constrained environments.
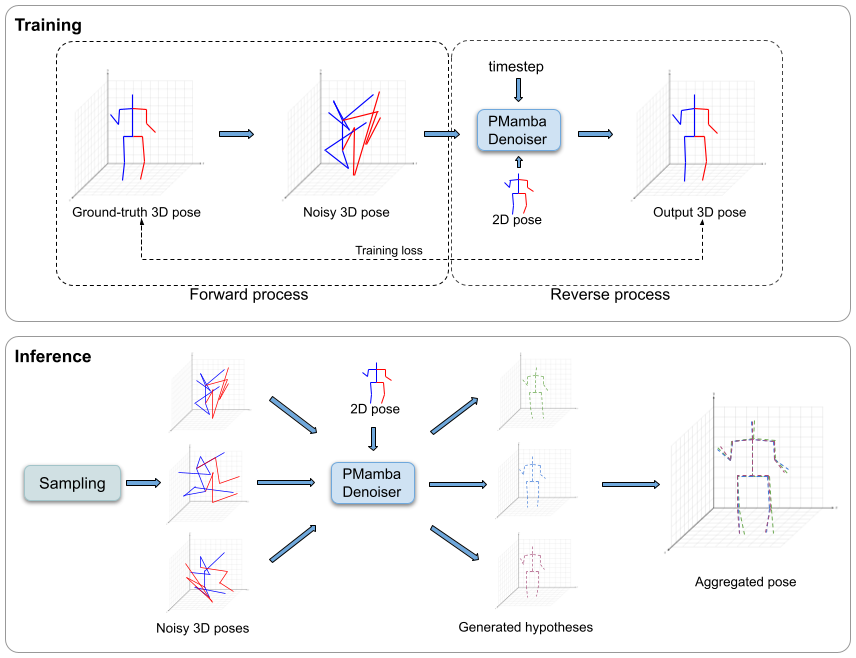
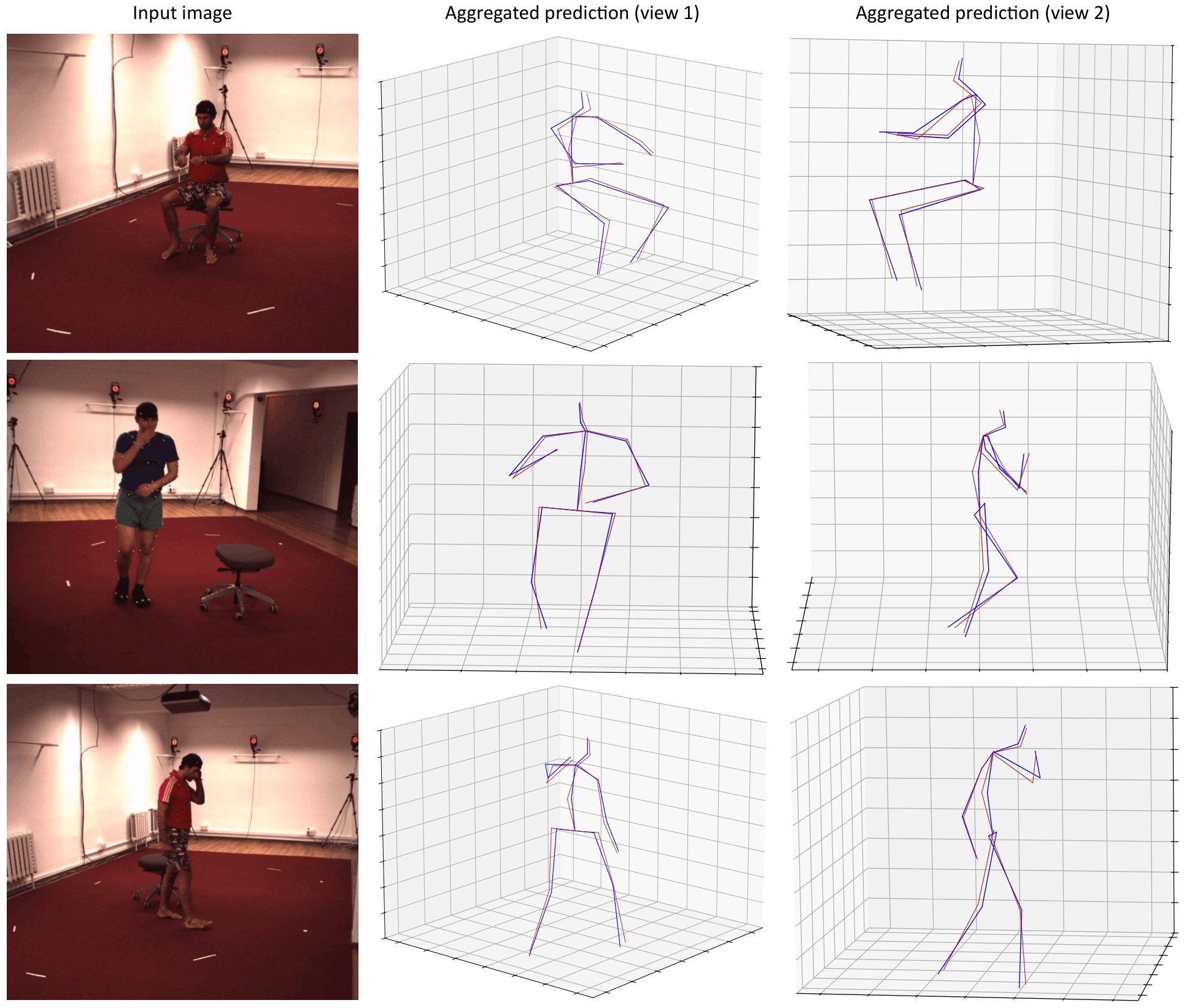
Furthermore, most monocular 3D pose estimation methods generate a single deterministic prediction,
which is often inadequate in scenarios where occlusion or depth ambiguity introduces genuine uncertainty in the underlying pose.
Limited research has explored the integration of temporal reliability estimation into pose refinement,
particularly for identifying which joint predictions can be trusted and which require correction based on temporal context and surrounding information.
This research addresses these challenges by developing efficient and uncertainty-aware human pose estimation methods that remain robust under real-world challenges,
enabling reliable human body tracking in diverse and complex environments.
Media:
Additional images/video
Selected Publications
Web
Kappan, M. M., Sandoval, E. B., Meijering, E., & Cruz, F. (2026). A survey on deep learning for 2D and 3D human pose estimation. Artificial Intelligence Review, 59(1), 32.
Zhao, H., Kappan, M. M., Bamdad, M., & Cruz, F. (2025). LAPX: Lightweight Hourglass Network with Global Context. In Proceedings of the Australasian Conference on Robotics and Automation (ACRA), 2025.
Kappan, M. M., Sandoval, E. B., Meijering, E., & Cruz, F. (2024). Attention-enhanced lightweight hourglass network for human pose estimation. In Proceedings of the Australasian Conference on Robotics and Automation (ACRA), 2024..