Applied Spiking Architectures: From Dynamic Visual Sensing to Transparent Physical Actuation
Developing an end-to-end, biologically inspired computing stack that pairs event-based vision with explainable Spiking Neural Networks (SNNs) to enable robust, power-efficient, and transparent perception for physical autonomous systems operating in dynamic real-world environments. Date: 2024 - 2027 Persons participating in the project:
- PIs: Dr. Francisco Cruz, A/Prof. Leo Wu
- Associates: Oltan Sevinc
- Corresponding contact: m.sevinc@unsw.edu.au
- Spiking Neural Networks (SNNs)
- Event-based Vision
- Neuromorphic Computing
- Explainable AI (XAI)
- Computer Vision
- Embodied AI and Autonomous Systems
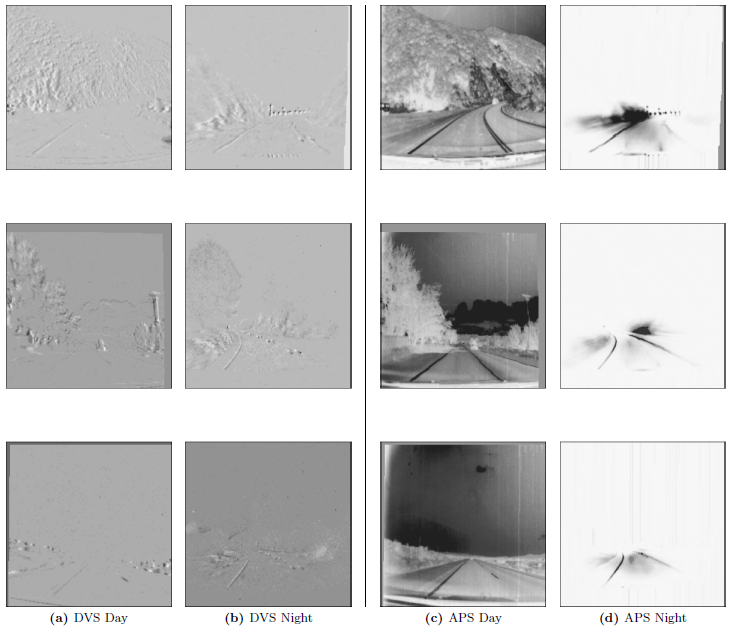
- Robust Event-Driven Sensing: Leveraging the high temporal resolution and high dynamic range of event cameras to maintain perceptual robustness under volatile, real-world lighting conditions.
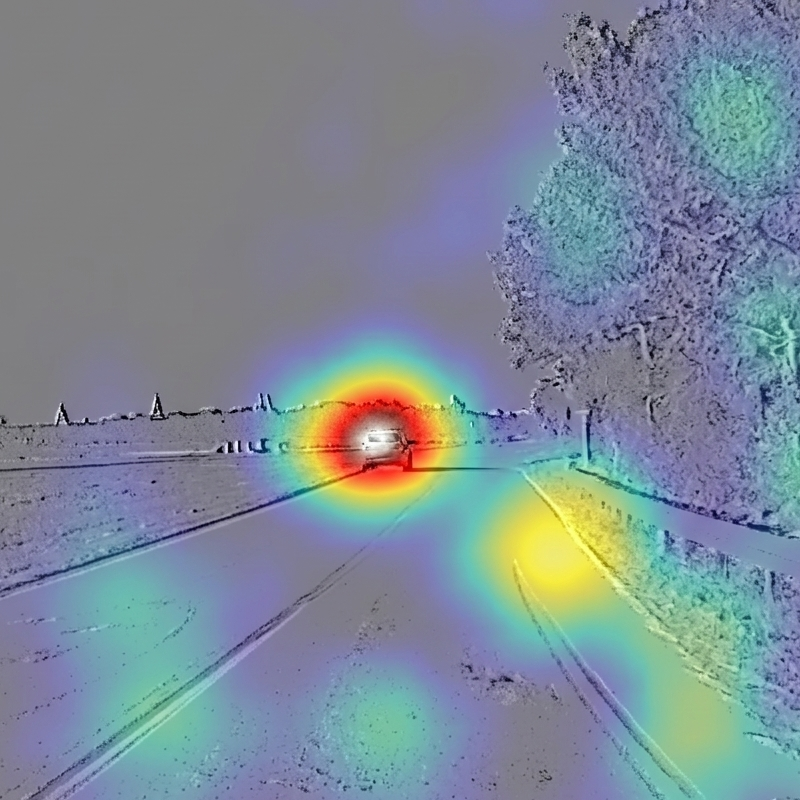
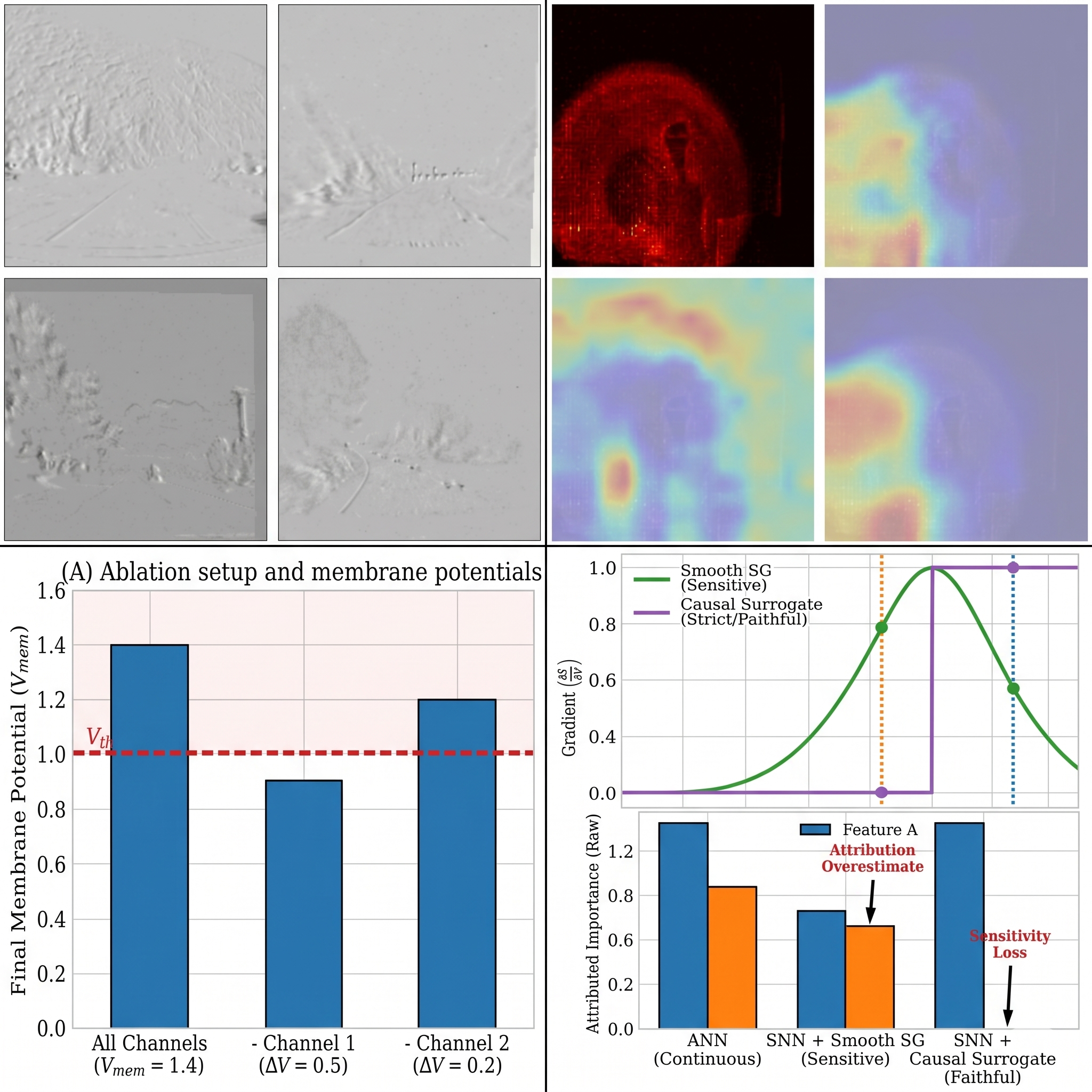
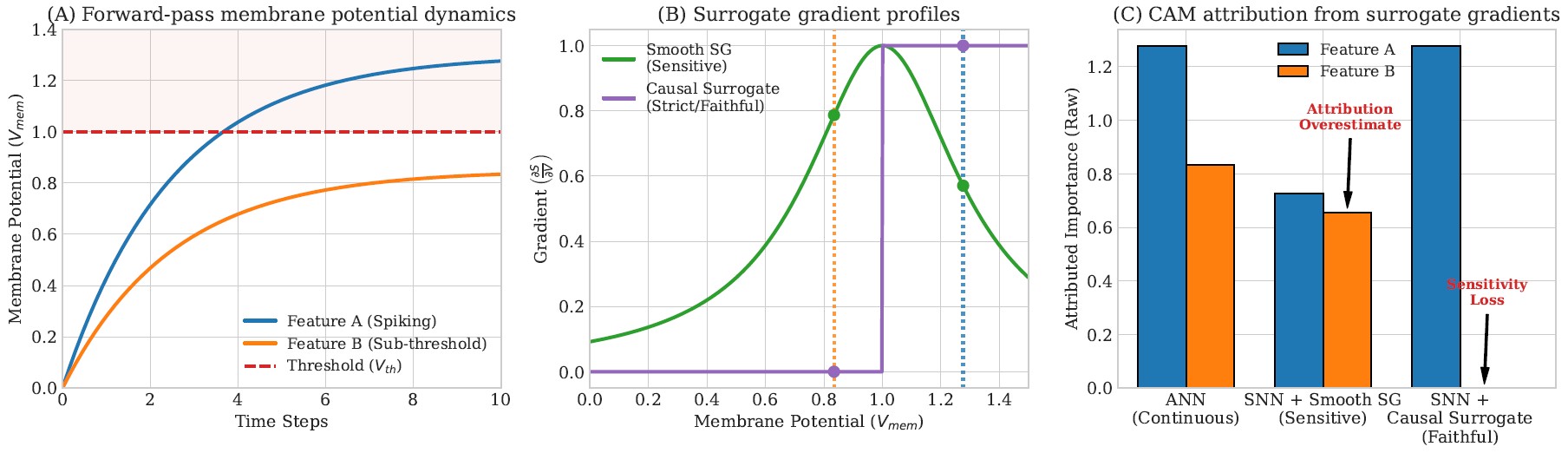
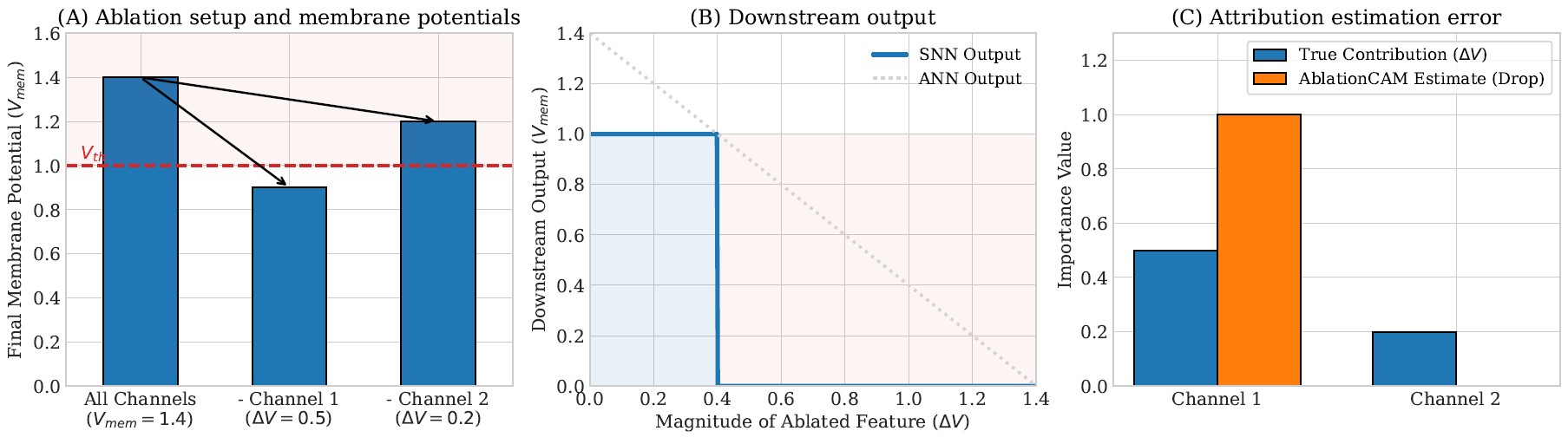
- Transparent Spiking Computation: Utilizing Spiking Neural Networks (SNNs) for energy-efficient, asynchronous processing, while developing novel explainability frameworks (such as Class Activation Maps tailored for SNNs) to untangle the "black box" nature of spiking architectures.
- Physical Edge Actuation: Deploying these robust, interpretable models onto physical hardware platforms to validate end-to-end event-driven intelligence in real-time robotic or autonomous scenarios.
| Selected Publications | Web |
|---|---|
| Oltan Sevinc, M., Wu, L., & Cruz, F. (2025). Towards Closing the Domain Gap with Event Cameras. Proceedings of the Australasian Conference on Robotics and Automation (ACRA), 2025. | |